Commande des Systèmes
Commande des Systèmes Dynamiques
Description : Le cours de Commande des Systèmes Dynamique de deuxième année vise à fournir aux étudiants les compétences nécessaires pour comprendre les principes fondamentaux des systèmes dynamiques. Ils disposeront ainsi des moyens pour analyser et mettre en œuvre des systèmes de commande efficaces dans un large éventail d’applications, en mettant l’accent sur la compréhension des concepts théoriques ainsi que sur leur application pratique.
Bibliographie :
- Ref. [1] : C.T. Chen, Linear Systems Theory and Design. Oxford University Press, 3rd Ed. (1999)
Acquis d’apprentissage : A l’issue de ce cours de deuxième année, l’étudiant sera en mesure de mettre en œuvre des méthodes d’identification de système. Il aura la capacité de mettre au point des lois de commande exploitant les mesures disponibles et répondant à des critères optimaux qui seront associés aux contraintes imposées au système.
Modalités d’évaluation : Compte-rendu de travaux expérimentaux
Compétences évaluées :
- Modélisation Physique
- Traitement Données
- Analyse Systèmes
Responsable de cours : Jean-Luc Collette
Identifiant Geode : SPM-AUT-002
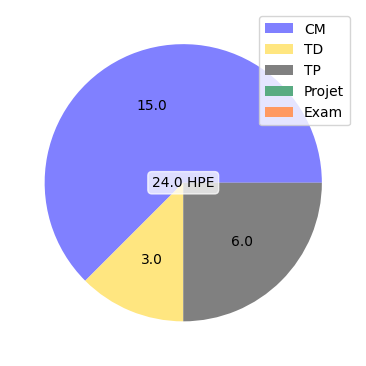
CM :
- Représentation d’état : Systèmes commandables, stabilisables (1.5 h)
- Représentation d’état : Systèmes observables, détectables (1.5 h)
- Représentation d’état : Forme canonique de Kalman (1.5 h)
- Commande par retour d’état : Commande par placement des pôles (1.5 h)
- Commande par retour d’état : Commande linéaire quadratique (1.5 h)
- Commande par retour d’état : compléments (1.5 h)
- Observateurs : Réglage avec placement des pôles (1.5 h)
- Observateurs : Réglage avec filtre de Kalman (1.5 h)
- Observateurs : Commande LQG (1.5 h)
- Séminaire Industriel (1.5 h)
TD :
- TD Représentation d’état (1.5 h)
- TD Commande par retour d’état et observateur (1.5 h)
TP :
- TP Représentation d’état (3.0 h)
- TP Commande par retour d’état et observateur (3.0 h)